ros-meetup-slides
Nix/Nixos
ОС-независимая сборка пакетов ROS
|
Брылёв Игорь robossembler.org
Что же такое ROS?
- Стандарт
- Фреймворк
- Набор форматов
- ...
- Система сборки и дистрибьюции ПО
Проблемы пакетных менеджеров
- Апгрейд конфигурации безвозвратно изменяет состояние системы
- Сборки не детерминированы
- Не поддерживаются разные версии бинарников и библиотек
- Конфликты пакетов
Проблемы управления зависимостями в ROS
- Зависимость от Ubuntu и её системных зависимостей (apt-пакеты)
- Сложность интеграции с ПО вне ROS-экосистемы
- Подготовить для удобного запуска сложный ROS-проект - трудоёмкая задача
Тренды
- Из набора библиотек для одного робота ROS становится стандартом для роботизированных кибер-физических систем
- В робототехнику проникают инструменты из других ниш: web, машинное обучение, DevOps
А как же Docker?
"В"
воспроизводимость
Теория
Dockerfile -> Image
Реальность
Dockerfile -> Image1 || Image2 ... ImageN
Типичный Dockerfile для ROS
FROM ros:foxy-ros-base-focal
...
RUN rosdep update && apt-get update
...
RUN apk add --no-cache python g++ make
...
RUN curl -sSL http://get.gazebosim.org | sh
...
CMD [ "ros2", "launch", "app", "app_bringup.launch.py" ]
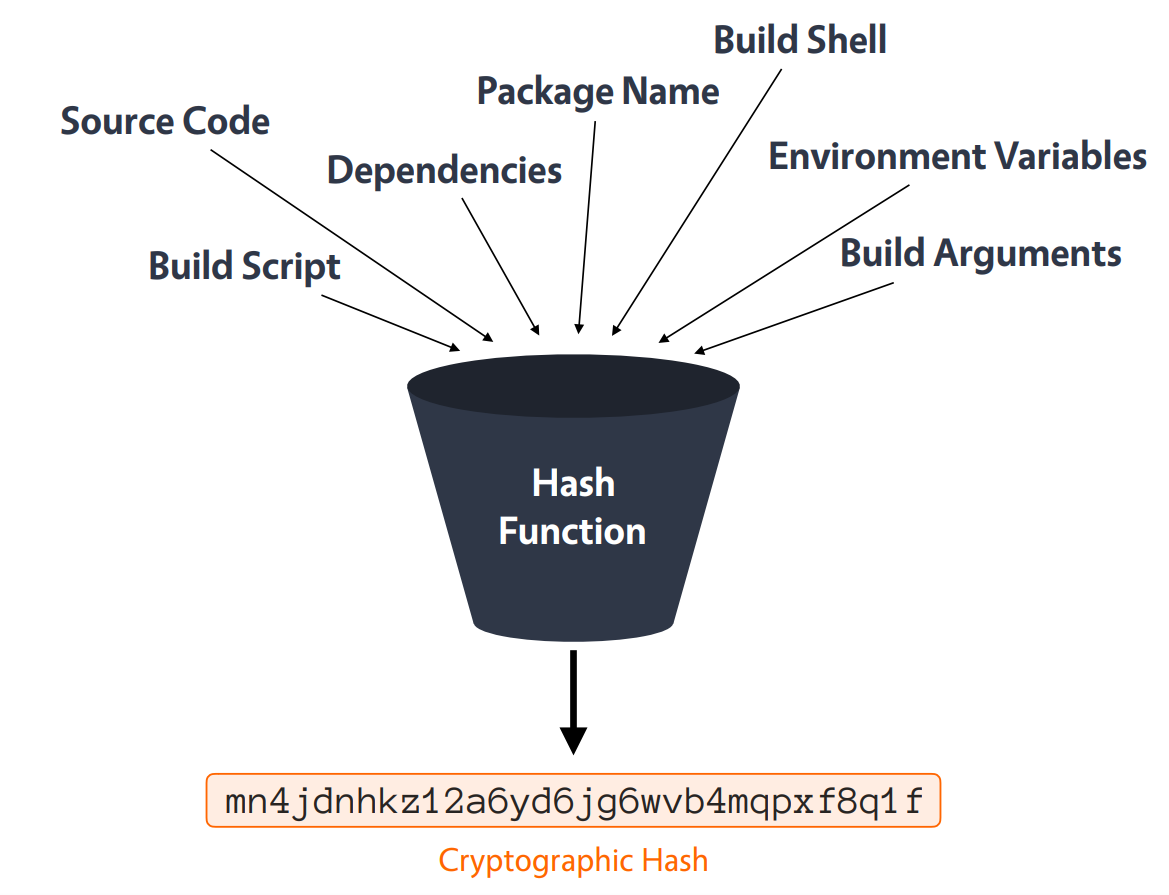
Ключевая идея nix
Описывать сборку в виде чистой функции или уравнения(derivation), результат исполнения строго детерминирован входными параметрами.
 Eelco Dolstra
Eelco Dolstra
The Purely Functional Software Deployment Model
PhD Thesis'2006 https://edolstra.github.io/pubs/phd-thesis.pdf
Парадигмы программирования
- Императивная (как?) - C, C++, Java
- Декларативная (что?) - Lisp, Prolog, Nix
Парадигмы конфигурации
- Императивная конфигурация (apt)
- Изменение состояния (dependency hell, неконсистентные состояния)
- Декларативная конфигурация (nix)
- Пакеты = иммутабельные переменные (нельзя изменить напрямую, только через функцию)
- Одно и то же nix-выражение даёт всегда один и тот же результат
{
pname = "hello";
version = "2.12.1";
src = fetchurl {
url = "http://github.com/hello-${version}.tar.bz2";
sha256 = "0x2g1jqy...";
};
buildInputs = [ libbar perl ncurses ];
buildPhase = ''gcc hello.c -o hello'';
installPhase = ''mkdir -p $out/bin && cp hello $out/bin'';
}
{
"builder": "/nix/store/561wgc73s0x1250hrgp7jm22hhv7yfln-bash-5.2-p15/bin/bash",
"env": {
"builder": "/nix/store/561wgc73s0x1250hrgp7jm22hhv7yfln-bash-5.2-p15/bin/bash",
"out": "/nix/store/260q5867crm1xjs4khgqpl6vr9kywql1-hello-2.12.1",
"src": "/nix/store/pa10z4ngm0g83kx9mssrqzz30s84vq7k-hello-2.12.1.tar.gz",
"stdenv": "/nix/store/b09v23lirgvci3wzszh22mbkdfj0h0yq-stdenv-linux",
"version": "2.12.1"
},
"inputDrvs": {
"/nix/store/0hnjp6s8k71xm62157v37zg3qzwvl8lx-bash-5.2-p15.drv": [ "out" ],
"/nix/store/8n3ib41pb90nkq3vv49z520qinf4q9c0-hello-2.12.1.tar.gz.drv": [ "out" ],
"/nix/store/r2h029bx2fbyxxj84s5hf1abp2vfkah2-stdenv-linux.drv": [ "out" ]
},
"inputSrcs": [ "/nix/store/6xg259477c90a229xwmb53pdfkn6ig3g-default-builder.sh" ],
"outputs": {
"out": { "path": "/nix/store/260q5867crm1xjs4khgqpl6vr9kywql1-hello-2.12.1" }
},
"system": "x86_64-linux"
}
}
$ ls /nix/store/ | grep humble
00z4hg8q0cxhsl5jq4s7iq81zz54j8vy-ros-humble-ament-lint-common-0.12.5-r1
01nvrmwbf0zbchb3d25kb49rl8jzspv6-ros-humble-ament-cmake-cppcheck-0.12.5-r1
02gdrzn2yrngmqih4hq0j17vj2hgiiz3-ros-humble-unique-identifier-msgs-2.2.1-r3
08s5gvg7gaypllyxvzd17w21ijqx3hgd-ros-humble-tf2-msgs-0.25.2-r1
0hwva9zk3250hd6spwq11ayk0aq4flnm-ros-humble-control-msgs-4.1.0-r1
Что это даёт для ROS?
- Возможность запустить проект ROS на любой ОС, даже без apt
- Контролируемое управление зависимостями
- Возможность использования разных версий одних и тех же пакетов и библиотек
- Детерминированные сборки одной командой
- CACHE!!!
Основные компоненты nix
- Nix (менеджер пакетов и язык программирования)
- Nixpkgs (репозиторий пакетов и стандартная библиотека)
- NixOS (операционная система)
- NixOps (DevOps инструмент)

Nix ROS Overlay
https://github.com/lopsided98/nix-ros-overlay
Автоматическая генерация nix-выражений для сборки пакетов ROS из официальных репозиториев (github:ros/rosdistro).
{ lib, buildRosPackage, fetchurl, ament-cmake ... }:
buildRosPackage {
pname = "ros-rolling-std-msgs";
version = "4.6.1-r1";
src = fetchurl {
url = "https://github.com/ros2-gbp/common_interfaces/std_msgs/4.6.1-1.tar.gz";
name = "4.6.1-1.tar.gz";
sha256 = "87eee895c2c60a8335ae2a63b05f99773f0897e451e5bf7f45a14a6c36295640";
};
buildType = "ament_cmake";
buildInputs = [ ament-cmake rosidl-default-generators ];
checkInputs = [ ament-lint-common ];
propagatedBuildInputs = [ builtin-interfaces rosidl-default-runtime ];
nativeBuildInputs = [ ament-cmake rosidl-default-generators ];
meta = {
description = ''A package containing some standard message definitions.'';
license = with lib.licenses; [ asl20 ];
};
}
Недостатки
- Пологая кривая обучения
- Некоторая разрозненность документации
- Не все пакеты ROS адаптированы в nix
- Необходимость сборки мусора
Полезные ресурсы
 Русскоязычное сообщество Telegram
@ru_nixos
Русскоязычное сообщество Telegram
@ru_nixos
Туториал для новичков zero-to-nix.com