Assembly Challenge 2020
Проект команды O2AC

Команда O2AC на World Robot Summit 2020 Assembly Challenge состояла из представителей OMRON SINIC X , OMRON , Osaka University, National Institute for Advanced Science and Technology (AIST) и Chukyo University.
Репозиторий который недавно был выложен на платформу GitHub данной командой, является их открытым исходным кодом, где представлено множетсво полезных решений в области автоматизированной сборки робототехническим сборочным комплексом. Их решение сводилось к полной автоматизации заранее заданной происзводственной операции. Итак рассмотрим основные фичи, которые были продемонстрированы этой командой
- Всё програмное обеспечение строилось на основе ROS Kinetic в Docker контейнере
- Используются одновременно 2 робота-манипулятора без риска столкновения
- Вставка детали в отверстие производится с помощью контроля импеданса
- Выравнивание детали производится за счёт сестемы технического зрения на библиотеке OpenCV
- Планирование следующего дейтсвия выполняется в момент выполнения траектории роботом-манипулятором, что оптимизирует общее время выполнения операции
- Автоматизированное закручивание винтов
- Используется собственно разработанный инструмент для затягивания винтов
- Обнаружение и захват деталей расположенных в лотке неструктурировано
- Для установленных деталей используется библиотека TF которая содержит локальную систему координат каждого установленного элемента
Репозиторий проекта состоит из 19 пакетов, в том числе есть пакеты которые достойны рассмотрения для реализации нашего Робосборщика. Кратко пройдёмся по каждому из них.
aist_modules
Данный пакет является метапакетом и разрабатывался членами команды из университета AIST. Он включает себя пакеты для 3D локализации и калибровки камер. Данный пакет можно рассмотреть в качестве альтернативы, но на сегодняшний момент возможно найдутся и другие пакеты которые справятся лучше.
o2ac_assemble_database
Данный пакет содержит базу данных, а также классы и их методы для загрузки сборок в сцену планирования MoveIt.
Загрузка данных для сборки производится за счёт Python скрипта parts_reader.py который загружает объекты в сцену как объекты с коллизией из исходных .yaml файлов в папке o2ac_assembly_database/config/name_of_config/. Также в данной базе данных присуствует информация о позиционировании захватного устройства, при захвате детали. Все эти данные загружаются непосредственно на сервер ROS откуда они уже забираются определённой нодой. Такая архитектура свойственна для ROS1, для ROS2 подход координально отличается, потому что параметры загружаются в ноду непосредственно при её запуске.
Если предыдущий скрипт брал геометрию каждой детали и публиковал их в сцену MoveIt, то следующий скрипт Assembly_reader.py делает всё тоже самое, но также ведёт обработку древовидной сборки и публикацию данной сборки в TF формате. То есть прямым образом заносит информацию на сервер какая деталь куда должна устанавливаться. Отдельно интересует данный фрагмент кода:
def get_frame_mating(self, base_object, child_object):
'''
Эта функция возвращает сопряжение двух деталей в сборке в виде сообщения geometry_msgs / Transform.
Вход 'base_object' - это строка, определяющая имя объекта, на который будет помещен дочерний объект.
Вход 'child_object' - это строка, определяющая имя объекта, который будет помещен в базовый объект.
Возвращает None, если между двумя объектами не определено сопряжение или объекты не являются частью загруженной сборки.
'''
base_object_id = next((part['id'] for part in self._parts_list if part['name'] == base_object), None)
child_object_id = next((part['id'] for part in self._parts_list if part['name'] == child_object), None)
transform = next((mating_transform for mating_transform in self.mating_transforms if int(mating_transform.header.frame_id.split('_')
[1]) == base_object_id and int(mating_transform.child_frame_id.split('_')[1]) == child_object_id), None)
if transform is not None:
frame_mating = get_transform(parent_frame=base_object + '/' + '_'.join(transform.header.frame_id.split('_')[2:]),
child_frame=child_object + '/' + '_'.join(transform.child_frame_id.split('_')[2:]),
transform=transform.transform)
return frame_mating
else:
return None
То есть данный фрагмент кода в соостветсвии с полученной базой данной последовательности сборки проверяет что куда устанавливать, выходом данной функции соответствует переменная frame_mating которая "судя по всему" является фреймом стыковки двух деталей.
Так как же обрабатывается последовательность сборки двух деталей. Об этом нам скажет следующий фрагмент скрипта:
def get_assembly_tree(self, collision_objects=[]):
'''
Возвращает цель сборки в виде древа преобразования TF
'''
self.mating_transforms = self._read_frames_to_mate_csv()
if not self.mating_transforms:
rospy.loginfo("No assembly tree defined")
return False
base_id = int(self.mating_transforms[0].header.frame_id.split('_')[1]) # Имя фрейма - "part_NN _...""
base_name = next((part['name'] for part in self._parts_list if part['id'] == base_id), None)
base_object = next((collision_object for collision_object in self._collision_objects if collision_object.id == base_name), None)
assembly_tree = self._collision_object_to_tf_tree(base_object)
for mating_transform in self.mating_transforms:
child_id = int(mating_transform.child_frame_id.split('_')[1])
child_name = next((part['name'] for part in self._parts_list if part['id'] == child_id), None)
child_object = next((collision_object for collision_object in self._collision_objects if collision_object.id == child_name), None)
tree_2 = self._collision_object_to_tf_tree(child_object)
mating_transform.header.frame_id = mating_transform.header.frame_id
mating_transform.child_frame_id = mating_transform.child_frame_id
self._add_part_to_assembly_tree(assembly_tree, tree_2, mating_transform)
return assembly_tree
То есть после загрузки данных о деталях как последовательность сборки, формирутеся древо преобразований TF, в котором содержится информация о том что где должно стоять. Также есть интересная функция, которая непосредственно отвечает за добавление одной последовательности в другую
Следующий скрипт visualise_metadata.py предназначен лишь для отображения позиция захвата деталей в сцене.
Также в пакете присуствуют файлы для описания последовательности сборки:
'name_of_parts'.yaml- содержит описание для подфреймов и захватных поз для деталей по именам. Все они загружаются на сервер, где к ним можно получить доступ через/'assembly_name'/'object_name'/'grasp_name'. Либо получить все фреймы для захвата детали через'assembly_name'/'object_name'frame_to_mate.csv- содержит описание стыковки деталей в сборке. Сопряжение определяется между подфреймами двух деталей.parts_list.yaml- содержит список деталей в сборкеid,nameиcadполе
o2ac_dynamixel
В рамках проекта Робосборщик, данный пакет не представляет интереса из-за его специфичности. В общем этот пакет является драйвером для двигателя Dynamixel.
o2ac_examples
Пакет содержит реализацию подключения физического робототехнического комплекса O2AC и различные примеры с MoveIt. При запуске примеров, он обращается к базе данных, которая использовалась на WRC2020.
o2ac_fastening_tools
Этот пакет контролирует крепежные инструменты, которые приводятся в действие двигателем XL320. Он также управляет механизмами всасывания и выпускания.
o2ac_flexbe
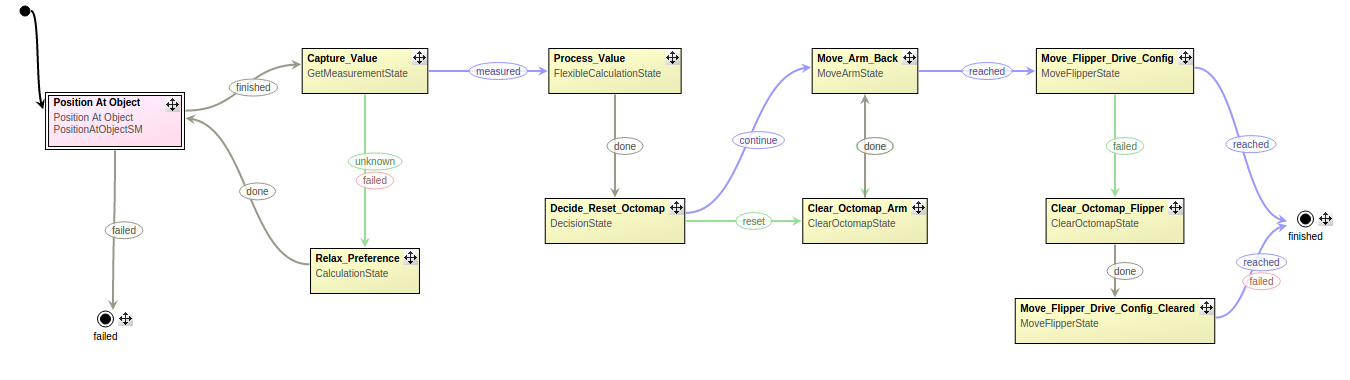
Данный пакет построен за счёт инструмента налаживания логики конечных автоматов (state machines) под названием Flexbe. К сожалению на данный момент этот инструмент не портирован для ROS2, но является достаточно облегчающим в разработке последовательности действий автоматизированного роботизированного сборочного комплекса.
Каждое состояние описывается определёнными функциями в скрипте Python.
def execute(self, userdata):
def on_enter(self, userdata):
def on_exit(self, userdata):
def on_start(self):
def on_stop(self):
Далее подобные состояния комбинируются за счёт графического интерфейса Flexbe и генерируется повередние робота. Пример графического интерфейса:
o2ac_gazebo
Данный репозиторий включает сцену симуляции Gazebo для робототехнического сборочного комлпекса O2AC и не включает ничего специфичного, по типу плагинов для данной сцены.
o2ac_moveit_config
Содержит стандартный конфигурацию для moveit подготовленную с помощью moveit_setup_assistant. Из нестандартного здесь представлен pilz_industrial_motion_planner который по-умолчанию не включен в moveit и интегрируется одельно, данный планер предоставляет удобный интерфейс реализации декартовых траекторий.
o2ac_msgs
Содержит все используемые сообщения, сервисы и действия используемые в проекте. Список следующий:
Сообщения
В основном все сообщения основаны на проверки текущей позы манипулятора, список следующий
- Estimated2DPoses.msg
- Estimated2DPosesArray.msg
- Estimated3DPoses.msg
- LookObservation.msg
- PlaceObservation.msg
- RobotStatus.msg
- TouchObservation.msg
Сервисы
Также представлен набор сервисом для управления, рассмотрим список
- FindObject.srv
- Принимает на вход
geometry_msgs/PoseStampedГде ожидается объектfloat64Насколько далеко объект может быть от ожидаемой позиции (в метрах)stringДеталь для обнаружения, например, "4" для двигателяstringКамера, которая будет использоваться для распознавания ("phoxi", "a_bot_realsense" ...)
- Выдаёт на выходе
boolистина/ложь о факте нахождения объектаgeometry_msgs/PoseStampedпозицию объекта
- Принимает на вход
- goToNamedPose.srv
- Принимает на вход
stringИмя заранее определённой позиции в move_group как позицию каждого шарнираstringИмя группы планирования, заранее определённой в move_group
- Выдаёт на выходе
boolуспех операции
- Принимает на вход
- pc2depth.srv
- Принимает на входе
stringимя топика, по которому передаётся облако точек
- Выдаёт на выходе
sensor_msgs/Imageизображение
- Принимает на входе
- publishMarker.srv
- Принимает на вход
geometry_msgs/PoseStampedпозицию для установки маркера в RVizstringтип маркера
- Выдаёт на выходе
- Ничего не выдаёт
- Принимает на вход
- sendScriptToUR.srv
- Принимает на вход
- Общие параметры
stringимя роботаstringимя исполняемой программы
- Параметры для спирального поиска и линейного поиска
float64Сила, которую применяет spiral_search или linear_search в НьютонахstringНаправление движения робота в spiral_search / linear_search в виде строки (обычно X + или Z-) (НЕ ИСПОЛЬЗУЕТСЯ, если установлен force_direction_vector)float64[]То же, что и выше, но как вектор направления [x, y, z] в захвате TCP. РАБОТАЕТ ТОЛЬКО ДЛЯ LINEAR_SEARCHfloat64[]Размер спирали. В м. По умолчанию: 0,0065float64[]Как быстро спираль увеличивается в размере за один оборот. В м. По умолчанию: 0,002float64[]Угловое приращение (в градусах!), на которое нарезается каждый поворот.geometry_msgs/Vector3Для вставки и spiral_search. В Н/м. Система координат звена инструмента.float64Скорость, с которой "insert" и linear_search продвигаются вперед. Чем медленне, вероятно, точнее.float64Для метода линейного поиска в метрахboolpeck_mode - использутеся в спиральном поиковом движенииbooluse_base_coords - для линейного поиска (linear_search)
- Для спирального движения
string«X», «Y», «Z», «YZ» (45 градусов), «Y30Z60» (30 градусов). В захвате CSYS.string"X", "Y", "Z". В захвате CSYS.float64Насколько движение продвигается вперед за полный оборотfloat64Когда движение вперед заканчиваетсяfloat64(Максимальная дистанция вставки элемента)float64Масса, используемая для контроля импеданса (по умолчанию: 10 кг)
- Для линейного передвижения реального робота
geometry_msgs/PoseStampedцелевая поза для линейного перемещенияfloat64ускорение, параметр move_1 (по умолчанию: 0.5)float64скорость, параметр move_1 (по умолчанию: 0.05)
- Линейное движение
geometry_msgs/Pointдля линейного перемещения последнего звена в его координатах (Z+ вперёд)geometry_msgs/Pointдля линейного перемещения в формате UR (угол-ось)boolесли false, тогда TCP. Если true, тогда точка базы
- Позиции звеньев
float64позиции звеньев
- Для грубой или адаптивной вставки
float64[]целевая сила для грубого режимаfloat64[]целевая поза для грубого режимаfloat64[]целевая скорость для грубого режимаfloat64[]движение для команды перемещения роботаboolпереключение между точками world и TCP для интерпретации вышеуказанных значенийstringОсь выравнивания UR в грубом режиме
- Новая поза TCP
float64устанавливает преобразование из системы координат TCP как позу. С помощью команды URscript set_tcp (tcp_pose)
- Общие параметры
- Выдаёт на выходе
boolуспех
- Принимает на вход
- visualizePoseBelief.srv
- Принимает на входе
moveit_msgs/CollisionObject(комментария нет, надо посмотреть состав сообщения)uint8geometry_msgs/PoseWithCovarianceStampeddurationuint8по умолчанию RPY_COVARIANCE = 0uint8по умолчанию LIE_COVARIANCE = 1
- Выдаёт на выходе
- Ничего не выдаёт
- Принимает на входе
Действия
Действия в ROS являются базовым конструктором связи с состоят из клиента и сервера. Модель такова, что клиент отсылает цель(запрос) серверу, который заточен на выполнение определённой операции и получает результат этого действия. В данном репозитории присутствует огромная библиотека действий, подразделяемая также на общие, техническое зрение и поведение. Рассмотрим список общих действий в проекте:
- DynamixelGripperCommand.action
- ScrewToolControl.action
- SuctionControl.action
- changeTool.action
- estimateTooltipDistance.action
- insert.action
- pickScrewFromFeeder.action
- place.action
- regrasp.action
- screw.action
- suckScrew.action
- updateDistribution.action
Рассмотрим список действия для технического зрения
- beltDetection.action
- checkPickSuccess.action
- detectAngle.action
- detectCableTip.action
- detectObjectTip.action
- detectOrientation.action
- get2DPosesFromSSD.action
- get3DPosesFromSSD.action
- getGraspCandidates.action
- getTipDistanceToHole.action
- localizeObject.action
- shaftHoleDetection.action
- shaftNotchDetection.action
Рассмотрим список действия поведения робота
- AlignBearingHoles.action
- Fasten.action
- FastenBearing.action
- Handover.action
- Insert.action
- MoveTo.action
- Orient.action
- Pick.action
- PlayBackSequence.action
o2ac_parts_description
Данный пакет не эксплуатировался в последней версии проекта представленной на WRC2020, соответственно опустим
o2ac_routines
Данный пакет является основным в перечне и предоставляет скрипты Python и управляющие программы C++ для управления всей роботизированной системой.
- taskboard.py и assembly.py запусают конкурсные задания
- calibration.py и osx_view_testing.py являются процедурами калибровки и тестирования
- Остальные файлы (например test.py) предназначены для разных тестов и прочего неважного кода.
Класс Controller
common.pyопределён вbase.pyи предлагает класс для управления всей роботизированной системой. Этот класс ( O2ACCommon) владеет другими классами, которые управляют разными подсистемами:- Робот руки (с помощью
robot_base.py,ur_robot.py,dual_arm.py,robotiq_gripper.pyиur_force_control.py) - Система технического зрения (через
vision_client.py) - Винтовые инструменты (через
tools.py)
- Робот руки (с помощью
taskboard.pyиassembly.pyопределены в O2ACCommon с помощью переменных и функций для конкретных задач
Последовательность действий
Они реализуют командные последовательности, в которых следующее движение либо планируется, в то время как предыдущее движение выполняется, либо совместные траектории могут сохранены или загружены в или из файла для выполнения, не требуя дополнительного времени на планирование.
Для примера см. subtask_zero метод в src/o2ac_routines/src/assembly.py.
Также см. Pilz_robot_programming, чтобы узнать об альтернативной реализации Python, которая, вероятно лучше
o2ac_rviz
Данный пакет включает в себя виджет для RViz, созданный для манипуляции и отладки процесса сборки. Каждый плагин для RViz пишется с использованием библиотеки Qt и интегрируется за счёт специального файла XML с описанием данного плагина.
o2ac_scene_description
Данный пакет включает в себя описание роботизированной системы и сцен. Определения деталей можно найти в o2ac_parts_description. Сцены описаны с помощью фалов xacro (macro XML) и URDF (Unifined Robotic Description Format).
o2ac_skills
Данный пакет не эксплуатировался в последней версии проекта представленной на WRC2020, соответственно опустим
o2ac_task_planning
Данный пакет не эксплуатировался в последней версии проекта представленной на WRC2020, соответственно опустим
o2ac_vision
Этот пакет содержит узлы, которые выполняют и передают дейсвия (actions) для комиьютерного зрения, например:
- Обнаружение объектов (SSD)
- Оценка позы детали (соответствие САПР)
- Определение позы захвата ремня
- Оценка вращения подшипника
Все навыки зрения основаны на действиях, поэтому расчетам разрешается сбой и тайм-аут.
Для этого узлы Python объявляют ряд действий, определенных в o2ac_msgs.
Распознавание деталей
Узел распознавания детали состоит из двух компонентов. Один - это обнаружение объекта (Chukyo), другой - оценка позы (AIST).
Подготовка
Для модуля распознавания деталей требуются предварительно обученные шаблоны. Которые загружаются по следующим ссылкам:
- Предварительно обученные веса модели SSD. Которые переименовываются и загружаются в
WRS.pthи помещаются вwrs_dataset/ssd.pytorch. - Шаблоны изображений для обнаружения мелких деталей:скачивание
- Поместите
templatesвwrs_dataset/data/
- Поместите
- Шаблон изображения для оценки угла Беринга: скачивание
- Поместить
bearing_template_image.pngиshaft_template_image.pngвo2ac_vision/config.
- Поместить
Обнаружение объектов
Скрипты Python для Single Shot MultiBox Detector (SSD) основаны на ssd.pytorch . Этот модуль обнаруживает несколько объектов в лотке. Возвращает список в формате словаря, который содержит рамку выделения, идентификатор класса, состояние (перевернут или нет) и достоверность.
Оценка позы для мелких деталей
Этот компонент оценивает двухмерную позу (x, y, theta) малых целей в системе координат изображения. Он передает выходные данные модуля обнаружения объектов, список ограничивающей рамки и идентификатор класса объекта.

Оценка позиции двигателя и подшипниковой опоры
Этот компонент вычисляет угол поворота в плоскости подшипниковой опоры с использованием алгоритма ICP. Возвращает угол поворота против часовой стрелки и горизонтальное смещение.

Порядок распознавания (AIST)
Вы можете построить порядок дейсвий от получения изображения до распознавания 3D - объектов, а также локализации с использованием o2ac_vision пакета, в сочетании с другими пакетами компьютерного зрения, т.е. aist_depth_filter, aist_localization и aist_model_spawner(по желанию). Порядок дейсвтий показан на следующем рисунке:

где приложение пользователя отображается зеленым цветом. Это клиентский узел, o2ac_msgs.localizeObjectAction который определяется как:
# Goal
string item_id
# (optional)
geometry_msgs/PoseWithCovarianceStamped expected_pose
---
# Result
bool succeeded
float32[] confidences
geometry_msgs/PoseStamped[] detected_poses
# (optional)
geometry_msgs/PoseWithCovarianceStamped[] detected_poses_with_covariance
Клиент запрашивает /object_recognizer найти объекты, указанные в item_id поле. В это время item_id должен быть именем файла сетки (без суффикса) , определенным в o2ac_parts_description/meshes, например 01-Base, 04_37D-GEARMOTOR-50-70, 08_KZAF1075NA4WA55GA20AA0 и т.д.
Порядок распознавания работает следующим образом
- Когда в цели указан ID распознаваемого объекта, объект
/object_recognizerотправляет цельo2ac_msgs.get2DPosesFromSSDActionтипа в объект/object_detector. - В
/object_detectorведётся поиск всех известных объектов через SSD, а затем возвращает часть ID и выделающая рамка к/object_recognizerдля каждого объекта. - Для каждой небольшой детали
/object_detectorтакже применяет сопоставление с шаблоном, которое определяет ее 2D-положение и ориентацию в выделяющей рамке. Они возвращаются/object_recognizerвместе с результатами SSD. - Для круглой ленты
/ object_detectorнаходит точки захвата, применяя детектор FGE (Fast Graspability Estimation). Точки захвата представлены его двухмерным положением и ориентацией оси движения двухпальцевого захвата. Как правило, на одном ремне можно найти несколько точек захвата. Они возвращаются в/ object_recognizerвместе с результатами SSD. - После получения ID детали и выделяющей рамки
/ object_recognizerдает команду/depth_filterсоздать облако точек в подобласти, соответствующей ограничивающей рамке. Созданное облако точек сохраняется в~/.ros/scene.plyв формате Stanford PLY. - Для общих деталей, ни маленьких, ни ленточных, узел
/localizationвосстанавливает файл PLY и выполняет трехмерное сопоставление с сетками, хранящимися вo2ac_parts_description. Если процесс сопоставления успешен, трехмерное положение и ориентация детали, а также значения достоверности возвращаются в результате типаo2ac_msgs.localizeObjectAction. Если найдено несколько поз-кандидатов, они сохраняются в порядке убывания значений достоверности. - Для небольших деталей и ремней узел
/localizationпреобразует их 2D-положения и ориентации в 3D-позы в предположении, что объекты лежат на «доминирующей плоскости».Доминирующая плоскостьопределяется по всему изображению глубины с помощью/depth_filterс надежной подгонкой плоскости с использованием RANSAC. Обнаруженный самолет публикуется в сообщении типаaist_depth_filter.FileInfoи подписывается узлом/localization.
Пример клиентской программы o2ac_vision / scripts / o2ac_recognition_client_example.py показывает, как использовать порядок распознавания из пользовательских прикладных программ. Образец также предоставляет средства для визуализации результатов 3D-локализации с помощью aist_model_spawner.
o2ac_visualisation
Данный пакет предосатвляет плагин визуализации состояния системы как для облегчения отладки, так и для демонстрации.
wrs_dataset
Данный пакет содержит датасет Pytorch, используемые в пакете o2ac_vision для обучения распознавания объектов.
Проект команды UC San Diego
Оригинал статьи Aayush Naik, Priyam Parashar, Jiaming Hu and Henrik I. Christensen - Lessons Learned Developing an Assembly System for WRS 2020 Assembly Challenge
Авторы ссылаются на опыт извлечённый ранее в ходе конкурса Amazon Picking Challenge - paper.
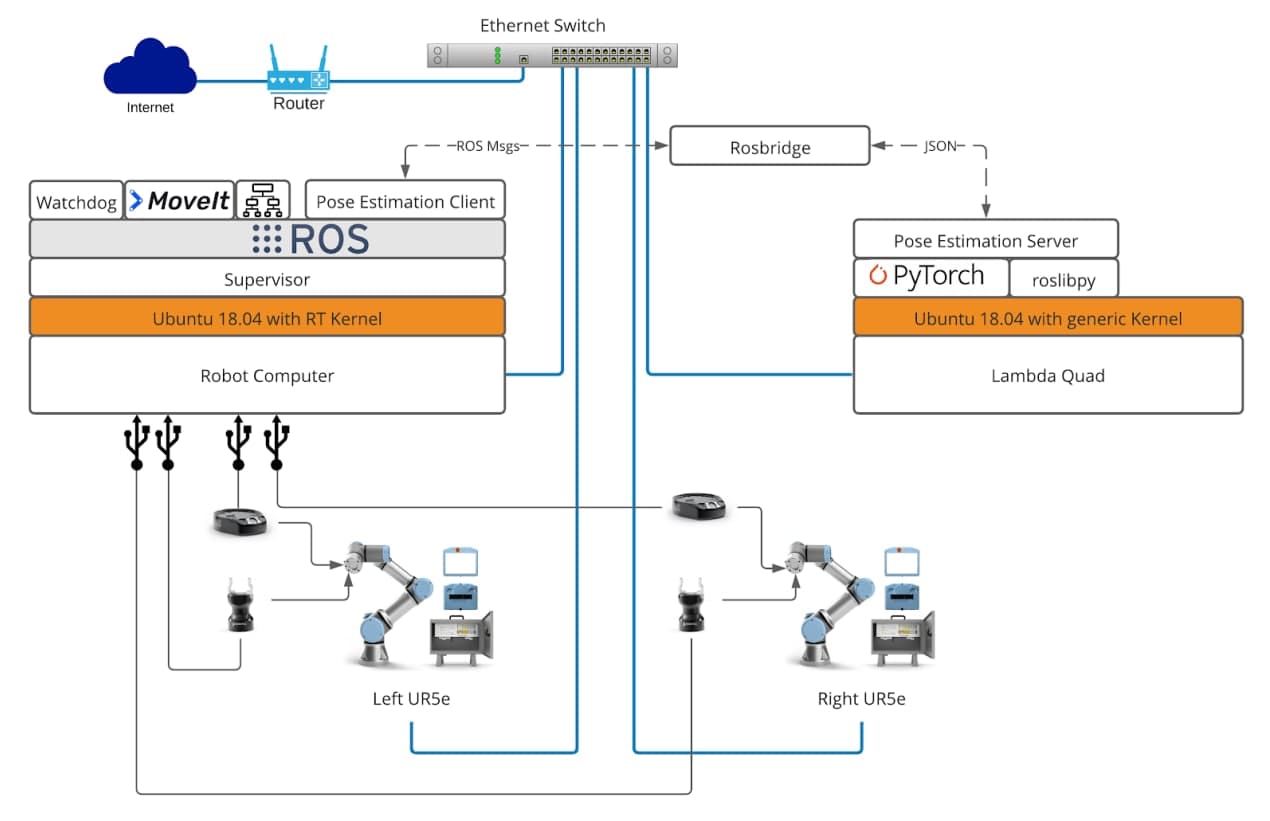
Система сборки была разделена на три классических архитектурных слоя абстракции: mission (миссия, верхний уровень), task (задача, средний уровень) и behaviour layer (поведенческий уровень, самый нижний). Уровень миссии и задач разбивает общий план сборки на ряд задач (представленных в виде деревьев поведения). Он также выполняет восстановление после сбоев и планирование в случае сбоев на уровне миссии. Уровень поведения содержит определения и программы для выполнения различных навыков, таких как перемещение руки робота, открывание/закрывание захватов и вставка. Дерево поведения для каждой задачи состоит из этих навыков в виде узлов действий. Существует также прозрачный “системный” уровень, который состоит из аппаратного обеспечения (роботов и датчиков), сетей,операционной системы, ROS и менеджера процессов, такой как Supervisor. Системный уровень отвечает за прозрачное восстановление после сбоев, не связанных с планированием.
Структурная схема установки
Планирование задач с обработкой ошибок
Разработчики смоделировали систему планирования на основе классической трехуровневой архитектуры (3T), сочетающей в себе совещательное планирование на верхнем уровне со специализированным планированием и реактивным управлением потоками на более низких уровнях. Планировщик миссий находил правильный порядок размещения деталей (столкновения между деталями являлись основным фактором) на базе AND/OR-графа, а планировщик задач, основанный на формализме иерархической сети задач (HTN SHOP3 Planner), опирается на знания предметной области и её объекты для создания экземпляра размещения детали в виде полностью упорядоченной последовательности примитивных действий. Результатом этих двух уровней является последовательность действий и связанных с ними предварительных условий для приведения в действие робота на основе таксономии примитивных навыков сборки, предложенной J. O. Huckaby в Knowledge transfer in robot manipulation tasks. Для создания экземпляров окончательных планов, разработанных планировщиком задач, и ввода правильных физических параметров использовались деревья поведения.
Разработчики создали иерархию классов для сбоев, которые могут возникнуть при планировании и выполнении сборки, и заметили, что, хотя некоторые сбои могут быть устранены реактивно на более низком уровне, другие необходимо будет передавать наверх - к совещательному планированию. Хотя объяснение полной иерархии классов выходит за рамки данного исследования, наиболее значимыми классами сбоев в системе сборки были сбои планирования задач, связанные с object grounding, и некритичные сбои выполнения, связанные с вероятностной полнотой. Grounding failures возникали, когда искомые объекты не находились в ожидаемых или оптимальных состояниях для сборочных приспособлений, что иногда требует пересмотра плана с помощью планировщика задач.
Деревья поведения
Для реализации деревьев поведения использовалась библиотека BehaviorTree.CPP и пользовательский интерфейс для редактирования деревьев Groot. Деревья поведения загружаются во рантайме и запускаются специальной программой BT-executor, которая работает в другой группе процессов Supervisor, нежели аппаратное обеспечение робота. Таким образом, когда перезапускается аппаратный узел или даже вся роботизированная система, дерево поведения продолжает работать и может возобновить выполнение – это значительно повышает отказоустойчивость. Каждый шаг выполнения записывается в key-value базу данных под названием Blackboard, которая используется для сохранения текущего состояния и для связи между узлами.
Типы действий (конечных узлов Behaviour Tree) поведенческого уровня:
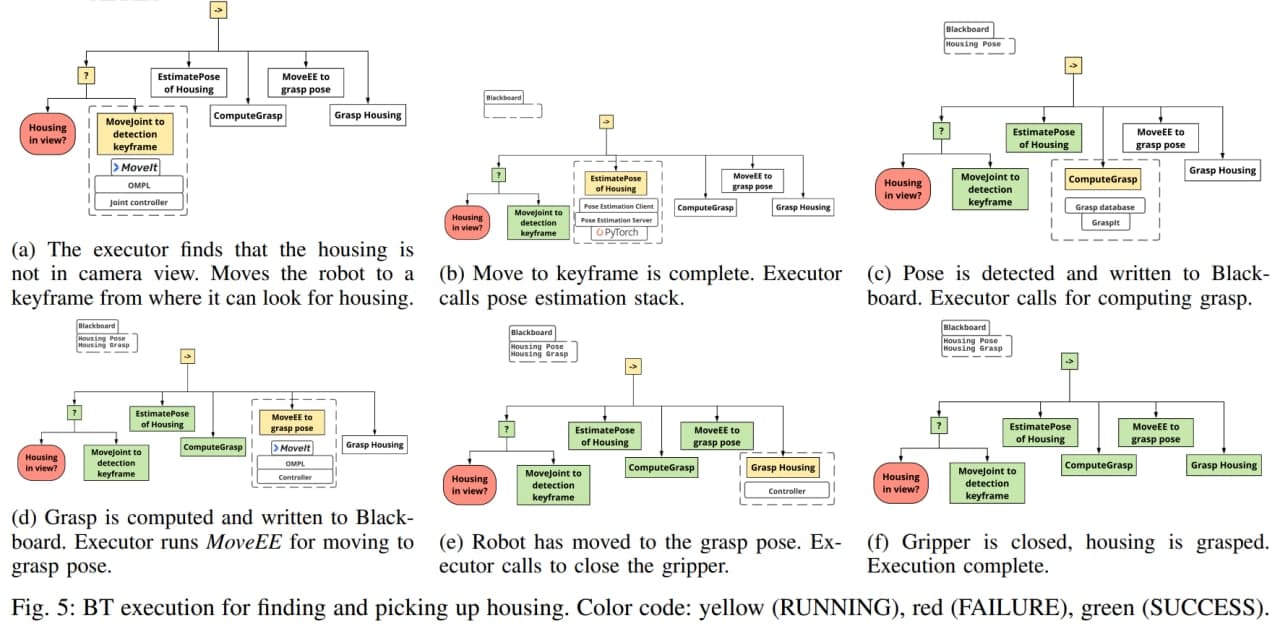
MoveJoint- Принимает в качестве цели (joint goal) либо предварительно вычисленное имя ключевого кадра (keyframe), либо числовые значения шарнира. Если это возможно, перемещает руку робота к цели.MoveEE- “Перемещение рабочего органа”. Принимает 6-мерную декартову пространственную цель для рабочего органа. Выполняет вычисления обратной кинематики и перемещает манипулятор робота так, чтобы фрейм конечного эффектора совпадал с фреймом целиGrasp- Открывает/закрывает пальцы захвата. Может также принимать значение от 0 до 1 для частичного открытия/закрытияMoveUntilFF- Перемещает робота вдоль текущей оси до тех пор, пока датчик силы UR5e не обнаружит силу, превышающую указанный порогSearchAlign- Выполняет поиск по спирали в текущей плоскости (перпендикулярно пальцам захвата) для отверстия или полостиNJInsert- NonJammingInsert, “Вставка без заклинивания”. После нахождения отверстия с помощьюSearchAlign, если мы просто протолкнем предмет в руке робота в отверстие, очень вероятно, что он застрянет (из-за строгих допусков). Объект толкается под небольшим углом в направлении, противоположном тому, где датчик ощущает наибольшую силу. Направление изменяется в режиме реального времени в соответствии с текущими значениями датчика силыEstimatePose- Учитывая изображение RGB и название объекта, оценивает позу объекта(объектов) в 6D в кадре камерыComputeGrasp- Используя имя объекта и его 6-мерную позу (в любой допустимой системе координат, обычно в кадре камеры), вычисляет позу конечного эффектора для стабильного захвата объекта. Эта поза захвата предварительно вычисляется для всех объектов с помощью Graspit и сохраняется в базе данных.
Иллюстрация исполнения дерева поведения для реализации задачи вставки детали:
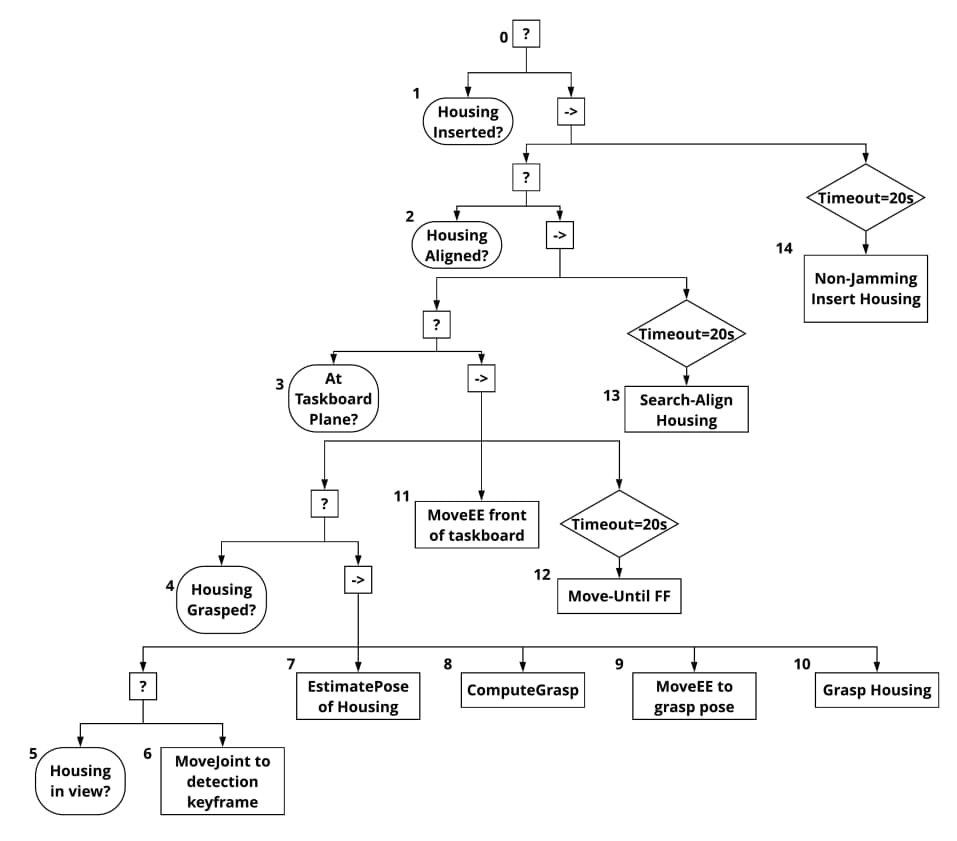
Подробное описание узлов 5-10
Специальные конструктивные решения
Авторы отмечают, что использование специальных конструктивных решений может значительно снизить сложность всей системы. Это наглядно иллюстрируется конструкцией пальцев:
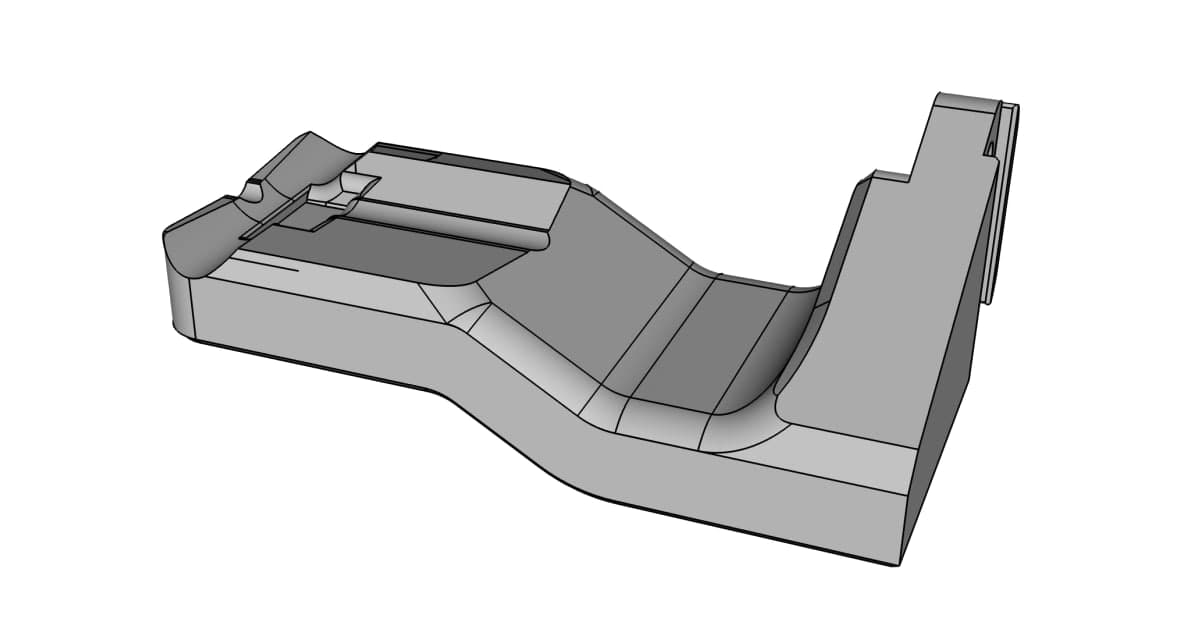
Пальцы имеют углубления для лучшего удержания винтов и стабилизации вала, а также имеют скошенную конструкцию, чтобы убедиться, что после захвата эластичная лента не вырывается. Эта конструкция была разработана в результате тщательного отбора из нескольких вариантов. Конструкция существенно упрощала захват. Например, даже если деталь располагалась с небольшим смещением от оптимальной позиции захвата, то она просто “вставала на место” из-за углублений.
Авторы также подчеркивают и обратное - неоптимальные конструкторские решения могут увеличить сложность системы. Например, наручные камеры Robotiq были смещены от центра оси захвата (смотрели вниз под углом от запястья) и это создавало проблемы для системы зрения.
Оценка положения детали
Авторы отмечают, что детали сборки из Assembly Challenge отличаются от объектов, которые обычно используются для задач оценки положения - они не имеют ярко выраженной текстуры, имеют различную симметрию, глянцевость, радиальную анизотропию и имеют мало отличительных свойств. Это делает задачу оценки позиции сложнее. Своё видение решения задачи с помощью RGB они изложили в работе Pose Estimation of Specular and Symmetrical Objects.
Обеспечение надёжности исполнения
Для проверки надёжности исполнения задания была введена метрика MTUI (mean time until intervention, среднее время до вмешательства человека). Без дополнительных мер обеспечения надёжноси MTUI был крайне низким, так как sampling-based планировщики движения не всегда находили правильное решение (в установленные сроки) и многие драйверы оборудования с открытым исходным кодом предоставляли ненадежные интерфейсы. Включение восстанавливающих работу функций с помощью деревьев поведения немного улучшило показатель MTUI. Добавление watchdog-подсистемы, которая отслеживала все
аппаратные компоненты и могла даже перезапустить всю систему в случае наихудших сбоев, значительно улучшило MTUI.
То есть использование подсистемы сторожевого пса для перезапуска вышедших из строя компонентов и использование деревьев поведения для возобновления выполнения и восстановления. Использование watchdog и деревьев поведения позволило довести показатель MTUI в среднем до трёх часов непрерывной работы.
Проблемы
Аппаратные
- При проектировании аппаратного обеспечения не учитывалось распределение нагрузки между USB-контроллерами. Из-за перегрузки оборудования (слишком много камер на одном контроллере) наблюдались частые сбои драйверов для камер. Эта проблема также перешла на захваты, которые находились на том же контроллере, что и камера. Исправлено путем подключения камер к различным USB-контроллерам и захватам к третьей шине компьютера
- Помехи между протоколами/кабелями USB-2 и USB-3 приводили к частым сбоям драйверов как для камер, так и для захватов. Исправлено с помощью удлинителей USB 3.0
- Проблемы с отключениями механических захватов. Несмотря на то, что захваты были на другом USB-контроллере, всё равно приходилось время от времени перезапускать захваты с помощью watchdog
- Сбой связи с манипуляторами. Протокол для связи ROS и UR5e имеет случайные сбои и требовал перезапуска. Это было обнаружено в логах
- Колебательное поведение робота при включении контроллера соответствия. Потребовались месяцы, прежде чем они определили первопричину: точка доступа Wi-Fi поблизости вызвала шум датчика силы и крутящего момента робота.
Программные
- Контроллеры ROS не запускались. Было исправлено путем отслеживания списка активных контроллеров и перезапуска вышедших из строя контроллеров
- Планировщики стохастического движения иногда падали, даже если существовал выполнимый план. Решалось простым перепланированием
- Состояние гонки по описанию робота (описание робота не загружено на сервер параметров ROS до того, как это потребуется Контролеру соответствия - compliance controller из ros_control). Исправлено путем добавления 5-секундной задержки перед запуском контроллера соответствия
- Многие драйверы оборудования с открытым исходным кодом предоставляли ненадежные интерфейсы
Извлечённые уроки
- Ориентация на устранение неисправностей, модульность, реактивность - ключевые характеристики для обеспечения гибкой сборки
- Продуманные конструкторские решения снижают сложность задачи
- ROS 1 не подходит для промышленного применения:
- Интеграция двух манипуляторов и захватов робота в интегрированную систему была сложной задачей и требовала сложного управления пространством имен. ROS 1 не очень хорошо подходит для настройки нескольких роботов.
- ROS 1 изначально не поддерживает управление в реальном времени. Без реального контроля в режиме реального времени невозможно дать официальные гарантии
- Ограниченные промежуточные и продвинутые учебные руководства. Нет стандартных рекомендаций по структурированию сложной роботизированной системы.
Использованное ПО
- ОС Ubuntu 18.04
- ROS Melodic
- MoveIt/OMPL/LazyPRM для планирования движений
- BehaviorTree.CPP для деревьев поведения
- PyTorch для оценки позиции детали